# AR追踪器
AR追踪器ARTracker是AR系统的一部分。
提供了一种非常简单的方式,在特定的识别模式下识别出图像或者物体,对其进行跟随。其一版本代理到元素 XRARTracker。
对应在 xml 中的标签是 xr-ar-tracker。
# 创建AR追踪器
AR追踪器的典型创建和使用方式如下:
<xr-ar-tracker mode="Marker" src="/assets/2d-marker.png">
<xr-gltf model="gltf-damageHelmet"></xr-gltf>
</xr-ar-tracker>
可见我们使用了追踪器元素,为其指定了模式 mode 和识别对象地址 src,然后在其子级添加了一个 glTF模型(可以为任何派生自节点的元素)。
在除了
Plane以外的模式下,理论可以支持多个追踪器。(比如可以存在多个 Marker tracker)
# AR追踪器的不同模式
使用ARTracker 的 mode,必须和 ARSystem 的 识别模式(modes) 指定的模式完全一致。
根据 mode 的不同,ARTracker 的 src 和 子元素的作用和表现 也各不相同:
# 二维Marker
2D Marker识别模式,会将传入的 src (图片的网络地址) 或是 image(image类型资源id,优先使用)作为特征,去识别出三维空间一个平面上的图像部分,继而进行追踪。这个技术现在已经十分成熟可靠。
注意需要相机组件开启
isARCamera。 在这种追踪模式下,当AR系统识别到目标时会自动应用3D变换到AR追踪器组件所在的节点元素上,进而影响所有的子节点:
案例代码片段 链接
<xr-ar-tracker mode="Marker" src="{{markerImg}}">
<xr-gltf model="gltf" anim-autoplay position="0.2 0 -0.2" scale="0.6 0.6 0.6" rotation="0 -50 0" />
<xr-gltf model="gltf" anim-autoplay position="0.4 0 0.3" scale="0.5 0.5 0.5" rotation="0 -50 0" />
<xr-gltf model="gltf" anim-autoplay position="-0.3 0 0.3" scale="0.4 0.4 0.4" rotation="0 -50 0" />
</xr-ar-tracker>
# 三维Marker
3D Marker识别模式,使用方法与 2D Marker 基本一致,差异是,识别特征用的 src 需使用 三维识别特征文件 map,该文件可以通过 小程序示例 的 接口 - VisionKit视觉能力 - 3DMarkerAR 页面生成。
三维识别特征文件 map 是根据 VisionKit 提供的算法能力,通过环绕物体一周的视频生成。流程同时还会产出三维重建的产物 glTF。具体的生成视频规范、生成流程、以及产物细节可以参考 VisionKit 3DMarker。
该模式下,识别出来的三维坐标系,会自带一个基于生成视频的旋转,一般情况下,这个旋转值都是很接近的。可以在业务逻辑上,对这个旋转进行适配。
<xr-ar-tracker mode="Marker" src="/assets/3d-marker.map">
<!-- 一般情况下,可以用140度的旋转进行修正 -->
<xr-node rotation="140 0 0">
<xr-gltf model="gltf"></xr-gltf>
</xr-node>
</xr-ar-tracker>
# OSD
OSD(One-shot Detection)Marker识别模式,也会将传入的src或是image(image类型资源id,优先使用)作为特征去识别。
但不同于2D Marker,这是一个纯屏幕空间算法,只会影响到所有子节点的位置和缩放,不会影响旋转。
其一般以一个现实中物体的照片作为识别源,来识别出这个物体的在屏幕中的 二维区域,我们已经做好了到三维空间的转换,但开发者需要自己保证 tracker 下模型的比例是符合识别源的。
OSD模式在识别那些 二维的、特征清晰的物体 效果最好,比如广告牌。其余情况,识别准度不如 2D Marker。
这种模式一般用于给现实中的物体做标注,在使用这种模式时,开发者需要自己保证了解要识别的物体(的特征图片)的原始尺寸,然后基于这些信息去添加子节点:
案例代码片段 链接
<xr-ar-tracker mode="OSD" src="{{markerImg}}">
<xr-mesh geometry="plane" rotation="-90 0 0" scale="1 1 1" uniforms="u_baseColorFactor:0 1 0 0.5" states="alphaMode:BLEND" />
</xr-ar-tracker>
# Plane
平面识别模式,不依靠于src和image。
AR系统会标定出一个平面,相机组件开启 isARCamera 之后,相机的三维变换会与AR系统同步。
AR系统每帧会去求和这个平面的交点,之后同步到AR追踪器组件所在元素上,其所有的子节点继而受到影响。
由于这种模式的灵活度比较高,所以我们还给AR系统提供了几个接口供开发者使用:
// 传入某个节点的`nodeId`
scene.ar.placeHere(nodeId);
// 也可以传入元素引用,关闭`switchVisible`
scene.ar.placeHere(element, false);
// resetPlane
scene.ar.resetPlane();
placeHere方法接受一个节点的node-id或者元素引用,将当前和平面的焦点(即追踪器的3D变换)同步到这个节点上。第二个参数switchVisible则会在执行同步后自动将这个节点的visible设置为true。
resetPlane方法则是重置平面的标定。
# PlaneMarker
从基础库
v2.33.1开始支持。
ARsystem 识别模式 需支持 Plane Marker 模式,且开启使用。
平面识别模式下,使用 2D Marker 识别。
使用方法,在开启对应模式后,直接使用 2d Marker Tracker 的使用方式即可。
ar-tracker识别到目标后,会同步算法侧得到的,marker识别出来的,转化为相对于 平面模式世界空间的矩阵信息,到对应的 Tracker 节点。
该模式下,允许 同时识别多个 2D Marker。
目前版本,该模式仅适用于静态物体,识别物体更新频率相对较慢。每 3s,未明显移动会更新一下位置,每 7s 会进行重新检测。
案例代码片段 链接
<xr-ar-tracker mode="Marker" src="https://mmbizwxaminiprogram-1258344707.cos.ap-guangzhou.myqcloud.com/xr-frame/demo/marker/2dmarker-test.jpg">
<xr-gltf model="butterfly" anim-autoplay position="0.2 0 -0.2" scale="0.6 0.6 0.6" rotation="0 -50 0" />
<xr-gltf model="butterfly" anim-autoplay position="0.4 0 0.3" scale="0.5 0.5 0.5" rotation="0 -50 0" />
<xr-gltf model="butterfly" anim-autoplay position="-0.3 0 0.3" scale="0.4 0.4 0.4" rotation="0 -50 0" />
</xr-ar-tracker>
# threeDof
从基础库
2.30.4开始支持。
由于Plane模式在一些安卓机下不稳定,针对不需要用户移动而只需要旋转设备的应用,我们提供了threeDof模式。这种模式下只需要修改ARSystem的modes即可,不需要添加ARTracker。
# Face
从基础库
2.28.1开始支持。
前置相机依赖于客户端版本8.0.31
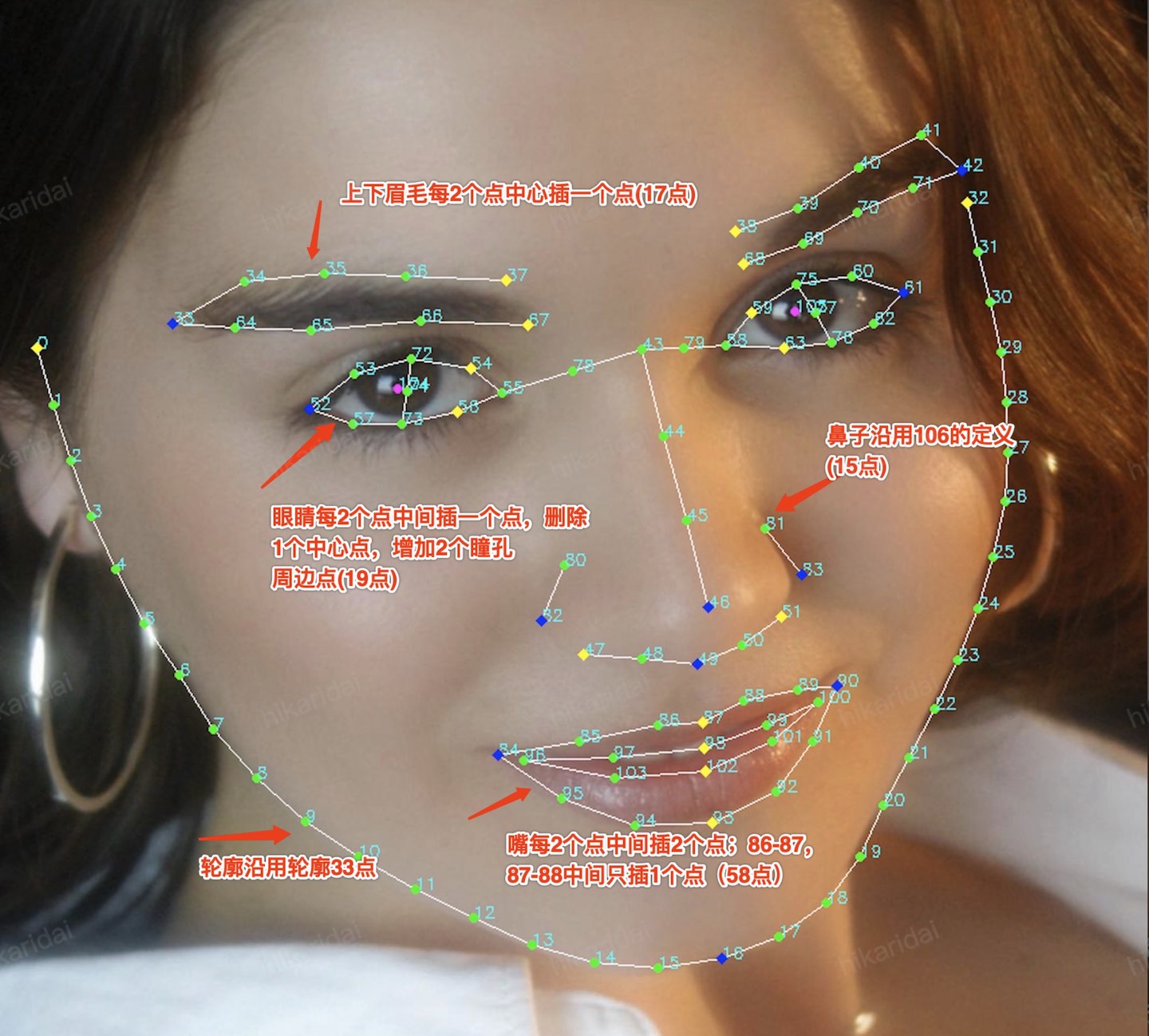
人脸识别模式,会通过图像算法识别出人面部的特征点,然后变换到3D空间,可用于一些换装应用等场景,比起上面几种模式,它多出了一个参数和一些方法:
<xr-ar-tracker mode="Face" auto-sync="-1 105 104 45 98">
<xr-mesh name="face" geometry="cube" scale="0.7 0.8 0.1" uniforms="u_baseColorFactor:1 1 1 0.5" states="renderQueue:2500,alphaMode:BLEND"/>
<xr-mesh name="eyeL" geometry="cube" scale="0.1 0.1 0.1" uniforms="u_baseColorFactor:0 1 0 1" />
<xr-mesh name="eyeR" geometry="cube" scale="0.1 0.1 0.1" uniforms="u_baseColorFactor:0 1 0 1" />
<xr-mesh name="nose" geometry="cube" scale="0.1 0.1 0.1" uniforms="u_baseColorFactor:0 0 1 1" />
<xr-mesh name="mouth" geometry="cube" scale="0.1 0.1 0.1" uniforms="u_baseColorFactor:1 0 0 1" />
</xr-ar-tracker>
auto-sync属性是一个数字数组,用于将对应顺序的子节点绑定到某个特征点上,其中-1表示忽略该节点,在运行过程中会自动同步变换信息,如示例:
与此同时,开发者还可以按自己的需求更加灵活地控制:
const tracker = el.getComponent(xrFrameSystem.ARTracker);
// 视情况需要自己同步`tracker`的`scale`和`rotation`特定节点。
// 第一个参数是特征点编好,第二个是可选的复用结果,第三个是可选的是否相对于`ARTracker`。
// 为`false`为世界空间的位置,需要配合`scale`自己使用
const position = tracker.getPosition(98, new xrSystem.Vector3(), false);
特征点定义如下:
# Body
从基础库
2.28.1开始支持。
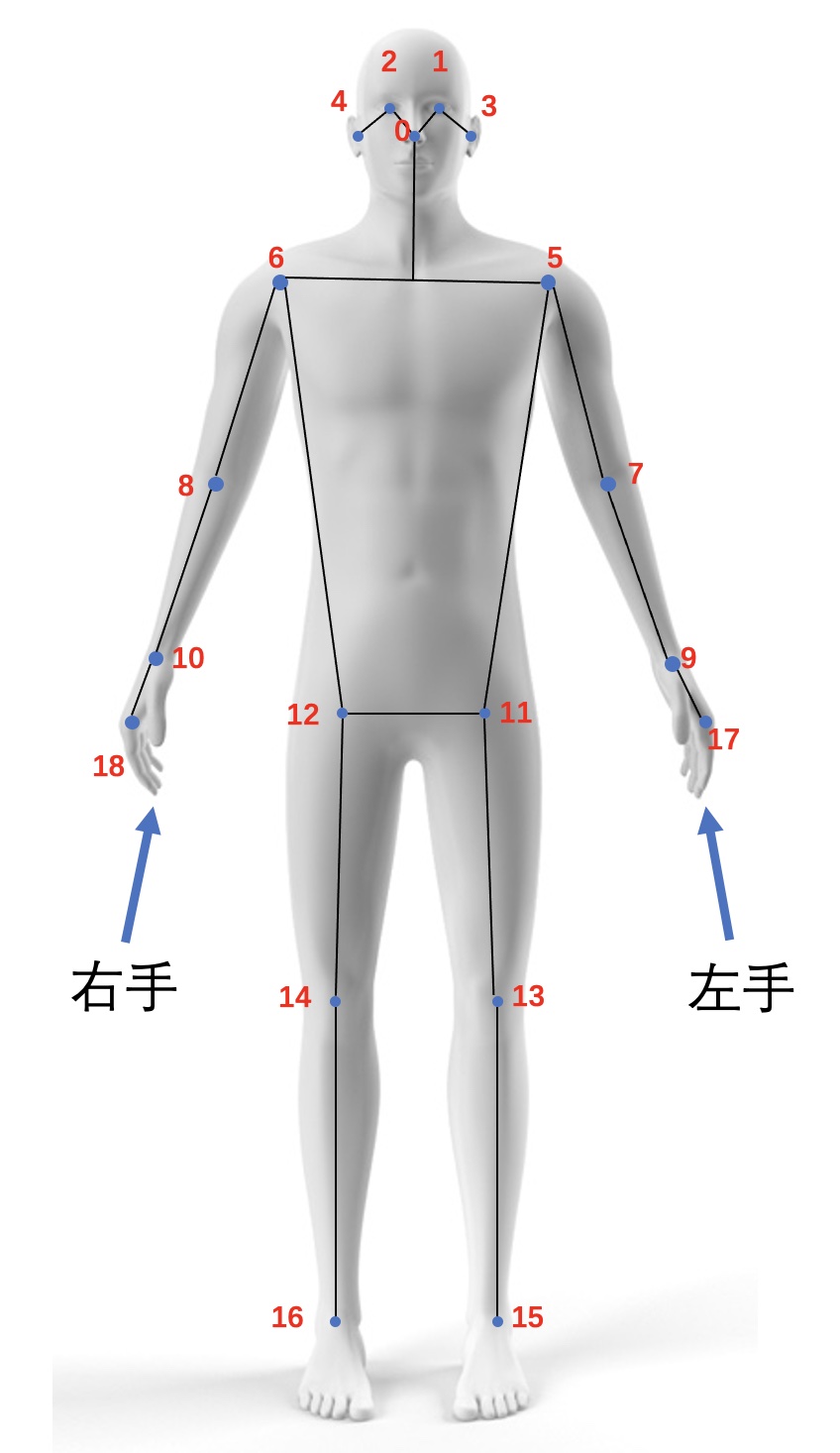
肢体识别模式,会通过图像算法识别出人躯干的特征点,然后变换到3D空间,可用于一些换装、游戏等场景,与Face模式用法一致:
特征点定义如下:
# Hand
从基础库
2.28.1开始支持。
手部识别模式,会通过图像算法识别出人手部的特征点,然后变换到3D空间,可用于一些手势等场景。与Face模式用法一致,但多出了两个参数:
// 获取手势姿态
const gesture = tracker.gesture;
// 获取总体置信度
const score = tracker.score;
特征点定义如下:
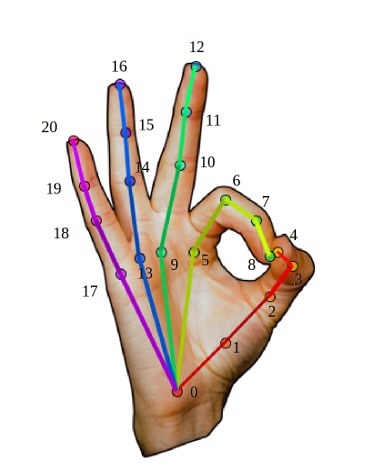
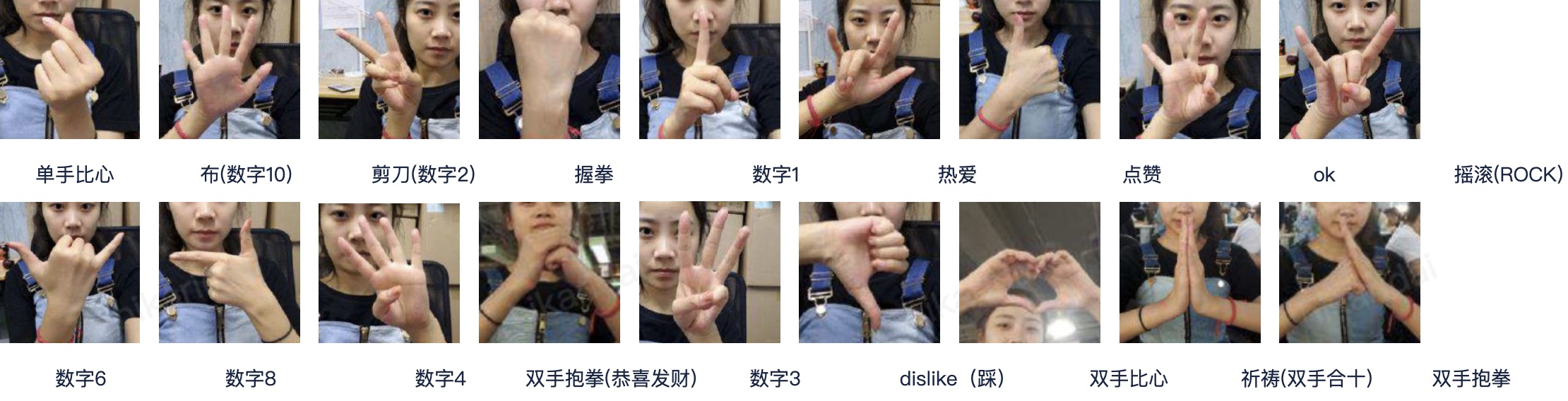
手势姿态(0~18,-1为无效):
# 获取追踪状态
在追踪器使用过程中,开发者往往会希望实事监测追踪状态,包括追踪中、追踪到、出错等,并进行相应的处理。我提供了两个事件来实现这个需求,其中ar-tracker-switch比较简单,仅仅在追踪到/追踪中切换,而ar-tracker-state则提供了更加详尽的信息:
ar-tracker-state事件从基础库2.29.1开始支持。
<xr-ar-tracker id="ar-tracker" mode="Marker" src="{{markerImg}}" bind:ar-tracker-state="handleARTrackerState">
<xr-gltf model="gltf" />
</xr-ar-tracker>
绑定后编写逻辑:
handleARTrackerState({detail}) {
// 事件的值即为`ARTracker`实例
const tracker = detail.value;
// 获取当前状态和错误信息
const {state, errorMessage} = tracker;
}
以上state的类型为EARTrackerState,当状态为EARTrackerState.Error时,可以从errorMessage获取详细错误信息。
但这里也要注意,由于某些使用时序的问题,很多场景下开发者需要自己去确定ARTracker的初始状态,比如在ARSystem的ar-ready事件中通过id获取ARTracker的引用,然后判定初始状态:
handleARReady({detail}) {
const xrFrameSystem = wx.getXrFrameSystem();
const tracker = this.scene.getElementById('ar-tracker').getComponent(xrFrameSystem.ARTracker);
// 初始状态
const {state, errorMessage} = tracker;
// 绑定事件
tracker.el.event.add('ar-tracker-state', tracker => {
const {state, errorMessage} = tracker;
});
}
# 事件
AR追踪器为元素提供了以下事件:
| 事件 | 参数 | 立即 | wxml | 时机 |
|---|---|---|---|---|
| ar-tracker-state | ARTracker实例,识别状态 | 是 | 是 | 要求基础库v2.29.1及以上,追踪器识别状态切换时,详见上一节 |
| ar-tracker-switch | boolean,识别状态 | 是 | 是 | 追踪器识别状态切换时,识别到了为true,否则为false |