# AR系统
AR系统 ARSystem 将 xr-frame 和 小程序AI系统 VisionKit 关联起来,让AR变得十分简单易用。
AR系统默认是关闭的,开启它需要在场景元素Scene上挂载ARSystem即可,以下是基础案例
<!-- 平面模式下,开启后置摄像头 -->
<xr-scene ar-system="modes:Plane;camera:Back">
</xr-scene>
ARSystem 支持以下几个属性,来决定AR系统的具体行为
# 识别模式
modes 属性,决定AR系统使用的具体识别模式。大部分情况下只允许同时运行一种模式。
目前不支持 modes 模式的动态切换。如果需要切换,可以考虑销毁原AR组件后,新建其他AR模式组件实现
目前支持的单一模式:
- 平面识别
Plane - 2DMarker / 3DMarker 识别
Marker - OSD识别
OSD - 人脸识别
Face - 肢体识别
Body - 手部识别
Hand
目前由于小程序AI系统限制,除了 Plane + Marker 模式外,只能同时开启一种模式!!!
目前支持的混合模式:
- 平面结合Marker识别
Plane Marker
<!-- 目前版本 plane + marker 模式下 planeMode 需设置为 1 (只允许水平面识别) -->
<xr-scene ar-system="modes:Plane Marker; planeMode: 1"></xr-scene>
# 摄像机朝向 camera
配置使用哪一个相机。
默认为后置Back,前置为Front。
前置相机依赖于客户端版本 8.0.31
# 平面识别模式 planeMode
在 Plane 模式,且支持 v2 的设备上,设定识别方式。
1 为水平面,2 为垂直面,3 为二者都识别。默认值为 3 二者都识别。
<!-- 平面模式下,只识别水平面 -->
<xr-scene ar-system="modes:Plane; planeMode: 1">
</xr-scene>
# 深度遮挡
Beta 版本特性 依赖基础库版本 v3.1.0
需要在
Plane模式,且支持v2的设备上,planeMode 需设定为1(只允许水平面识别)。
通过以下几个属性确定 ARsystem 深度遮挡的具体表现
depthMask在满足使用要求的情况下,是否开启实时深度遮挡。depthNear开启实时深度遮挡时,遮挡的近处阈值。depthFar开启实时深度遮挡时,遮挡的远处阈值。depthDebug开启实时深度遮挡时,显示一个用于Debug的图层。
案例代码片段 链接
<!-- plane + depth 模式下 planeMode 需设置为 1 (只允许水平面识别) -->
<!-- 水平平面识别情况下,开启深度,近处阈值为0.1,远处阈值为1的深度遮挡,并显示调试用图层 -->
<xr-scene ar-system="modes:Plane; planeMode: 1; depthMask: true; depthNear: 0.1; depthFar: 100; depthDebug: true;">
</xr-scene>
# 和相机协作
在相机一章中我们提到过其有两个数据需要和ar-system协作,下面就让我们详细论述。
# ARCamera
<xr-camera
background="ar" is-ar-camera
/>
首先是background,当将其设置为ar时,整个场景的背景将显示为当前手机摄像头拍摄的画面。
然后是isARCamera,将开启它时,这个相机会被作为AR相机,在AR系统为Plane和Marker模式时,相机的参数将由AR系统控制,请不要在脚本中自行修改相机属性!!!
# AR场景事件
<xr-scene bind:ready="handleReady" bind:ar-ready="handleARReady">
</xr-scene>
AR系统为场景元素提供了以下事件:
| 事件 | 参数 | 立即 | wxml | 时机 |
|---|---|---|---|---|
| ar-ready | 无 | 是 | 是 | ar功能启动成功 |
| ar-error | 错误error | 是 | 是 | ar功能启动失败 |
# 添加追踪器
开启了某种识别模式后,我们还需要使用对应的追踪器模块,才能完成识别和追踪,详见 AR追踪器(ARTracker) 部分。
ARTracker 需包含场景中所需要放置的元素,会进行 VKSession 识别事件返回的 Transform 矩阵信息、以及 部分模式特殊识别信息 的同步。
# 不同AR追踪器的坐标系差异
在使用对应的 识别模式 与 ARTracker后, xr-camera 会完全由 VisionKit 的 VKCamera 完全接管相机的控制权(使用 VKCamera 的 ViewMatrix 与 ProjectionMatrix)。
此时,xr-frame 的坐标系,将会由 VisionKit 对应模式的坐标系决定。
以下,结合案例(红色轴为 x 轴、绿色轴为 y 轴、蓝色轴为 z 轴,都朝向正方向,轴长为 2 )
简要阐述不同模式的坐标系规则:
# Plane 模式
平面模式下,初始化场景后,相机所在的坐标,就是世界坐标的 (0, 0, 0),坐标轴会基于初始化的手机朝向,决定坐标轴的方向(正上方为+Y,正右方为+X,正后方为+Z)。
手机的移动和旋转,相机都会有对应的响应。
周围的具体坐标信息变化,是存在多种情况。
# 在支持 Plane V2 模式下,会使用 Plane V2 模式:
该模式下,类似现实世界的空间坐标,坐标系的单位距离和现实中的物理距离有关,单位1相当于现实中的1m。
该模式下,trakcer同步的识别平面坐标,会完全基于三维空间坐标进行定义。

# 在不支持 Plane V2 模式下,会使用 Plane V1 模式,
该模式下,类似一个可以无限延展的平面空间,可以移动,但坐标系的单位距离和现实中的物理距离无关。
具体 VisionKit 细节可以参考 VisionKit Plane 文档。
# ThreeDof 模式
初始化场景后,相机所在的坐标下方,就是世界坐标的 (0, 0, 0)。
该模式下,类似一个可以无限延展的平面空间,不可以移动,且坐标系的单位距离和现实中的物理距离无关。
手机移动过程中,相机在坐标系中的坐标不会发生改变,但会有旋转的响应。。

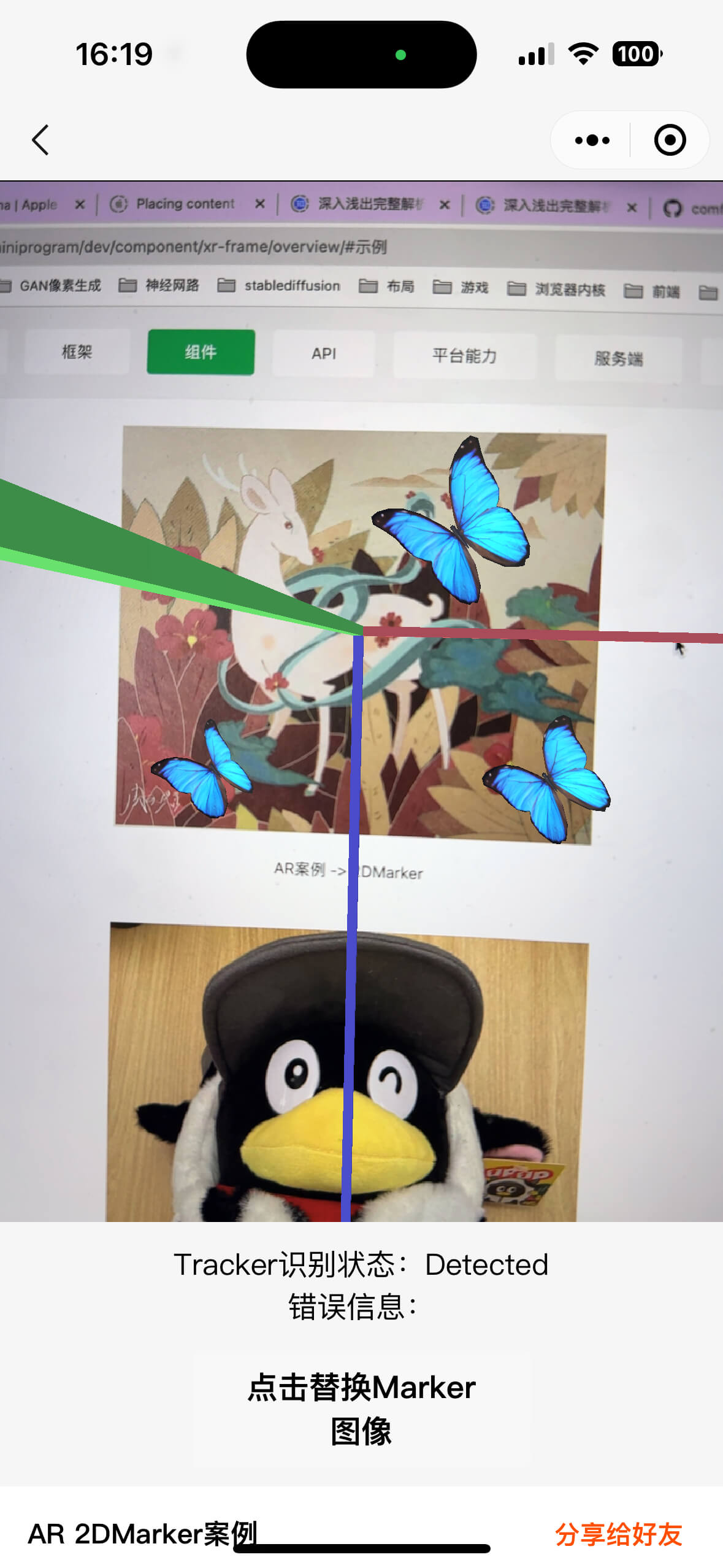
# Marker 模式
该模式下,识别点中心就是 世界坐标的 (0, 0, 0),坐标轴会基于识别物,决定坐标轴的方向(识别图片往外为+Y,识别图片右方为+X,识别图片下方为+Z),单位1相当于识别物体的大小。
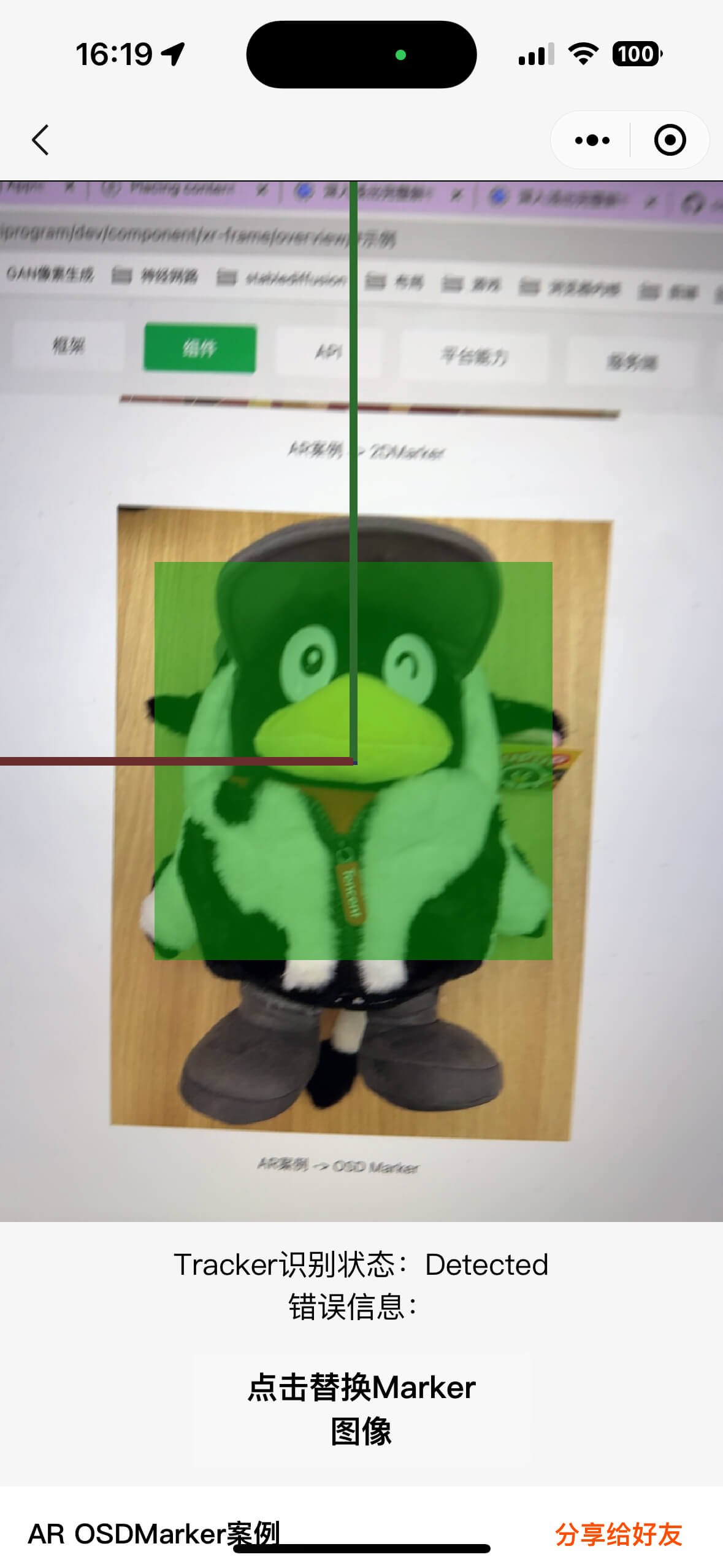
# OSD 模式
该模式下,识别结果为二维。
识别点中心就是 世界坐标的 (0, 0, 0),坐标轴会基于识别物,决定坐标轴的方向(识别图片往内为+Z,识别图片上方为+Y,识别图片向右为+X),单位1相当于识别物体的大小。
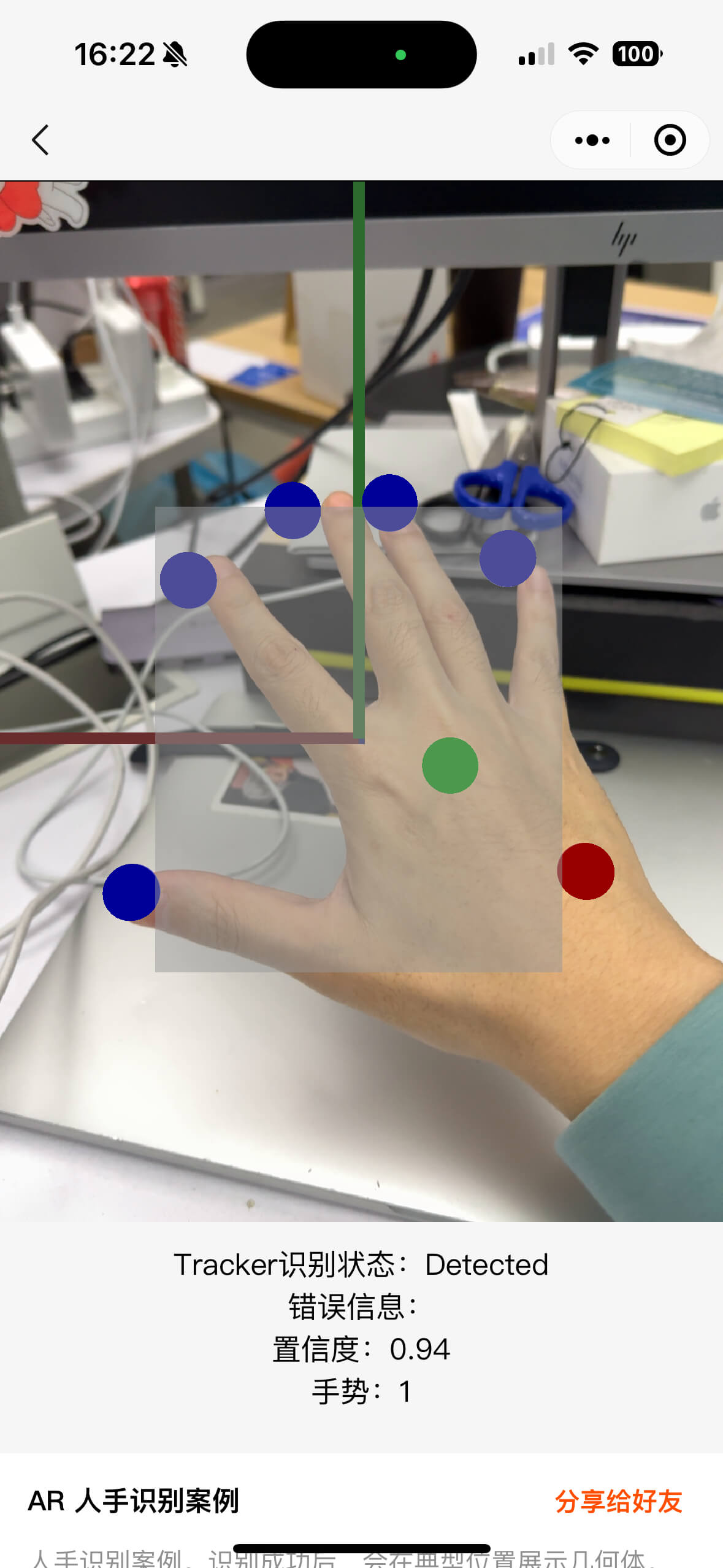
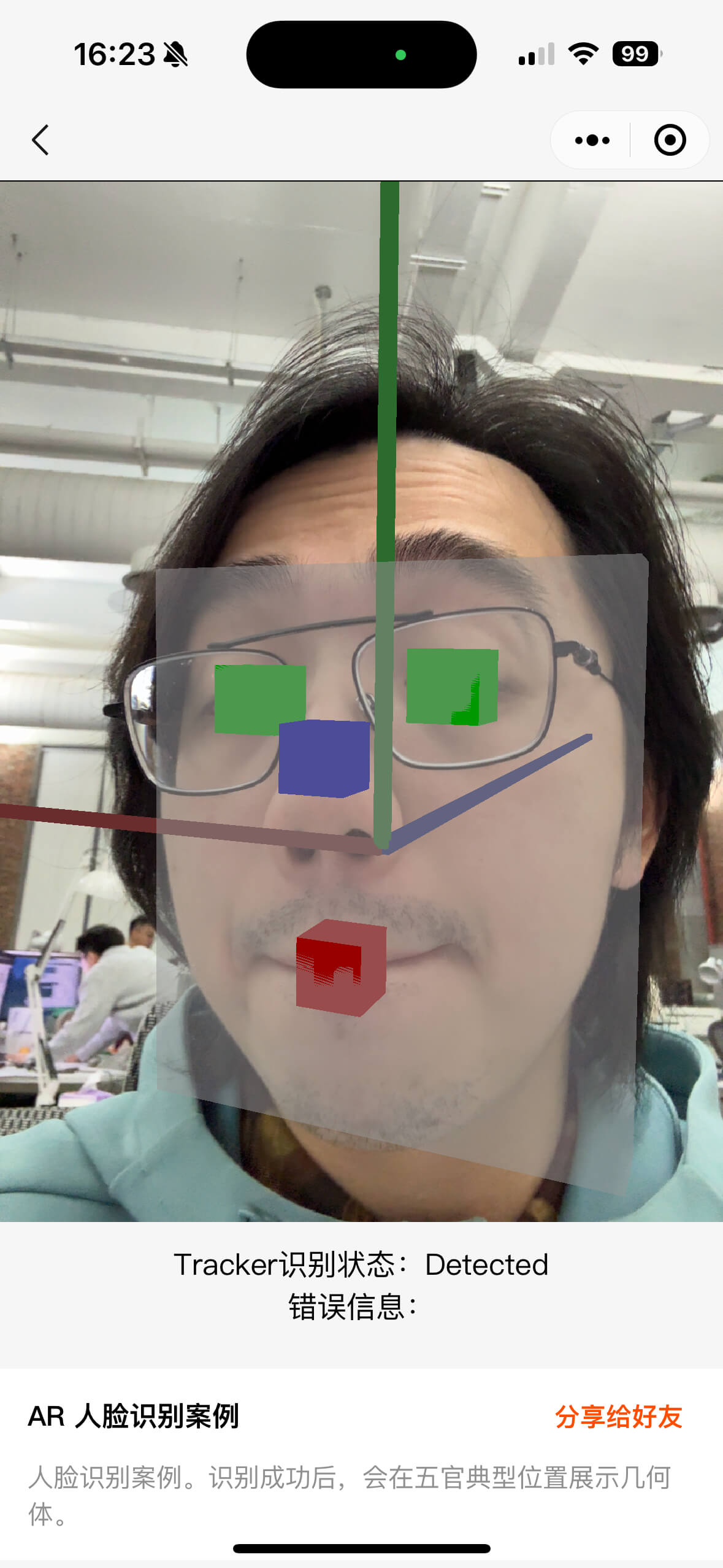
# Hand Face Body 模式
该模式下,识别点的关键点就是 世界坐标的 (0, 0, 0),坐标轴 也是用于特征点定位,单位1是基于识别物体的比例。