# 深度估计
VisionKit提供深度估计能力。
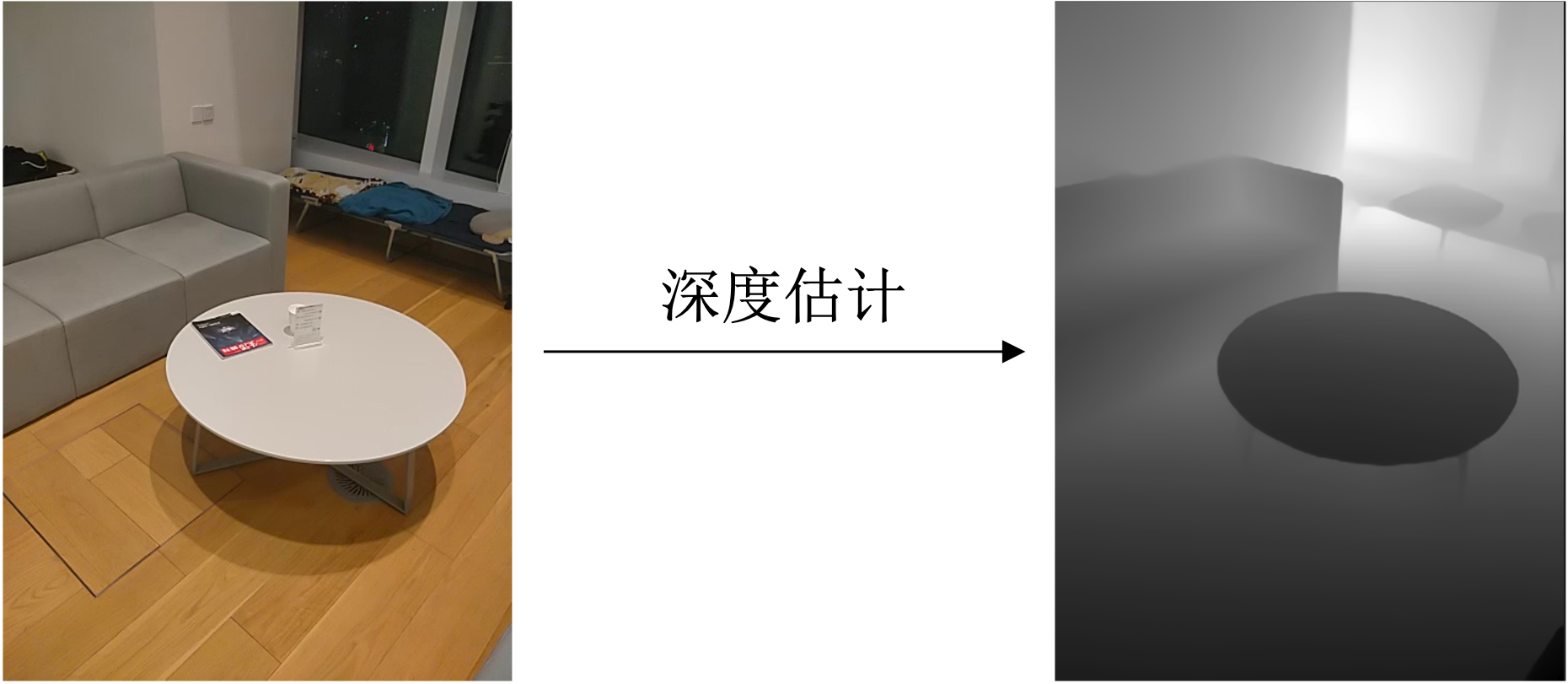
深度估计,就是获取图像中场景里的每个点到相机的距离信息,这种距离信息组成的图我们称之为深度图。
# 方法定义
我们在这里提供了深度估计的两种模式:
视觉模式: (安卓微信>=8.0.37,iOS微信>=8.0.38起) 使用摄像头进行深度估计 。
AR模式: (安卓微信>=8.0.38同时基础库>=2.33.0,iOS微信>=8.0.39同时基础库>=3.0.0) 使用摄像头和IMU进行深度估计,输出由near和far控制的非线性深度图,用于做虚实遮挡,目前支持部分机型,支持机型列表等同于6Dof-水平面AR-V2平面AR接口支持列表。
| 接口类型 |精度| 机型覆盖率 | |:-😐:-😐 |视觉模式 | 中 | 高 | |AR模式 | 高 | 中|
# 视觉模式接口
深度估计视觉模式接口提供2种使用方法,一种是输入一张静态图片进行深度估计,另一种是通过摄像头进行实时深度估计。
- 静态图片估计
通过VKSession.detectDepth接口输入一张图像,然后通过VKSession.on接口监听深度图信息,图中像素的值代表当前的深度值,颜色越黑,代表距离摄像头越近,反之颜色越白,代表距离深度越远。
示例代码:
const session = wx.createVKSession({
track: {
depth: {
mode: 2 // mode: 1 - 使用摄像头;2 - 手动传入图像
},
},
gl: this.gl,
})
// 静态图片估计模式下,每调一次 detectDepth 接口就会触发一次 updateAnchors 事件
session.on('updateAnchors', anchors => {
anchors.forEach(anchor => {
console.log('anchor.depthArray', anchor.depthArray) // 深度图 ArrayBuffer 数据
console.log('anchor.size', anchor.size) // 深度图大小,结果为数组[宽, 高]
})
})
// 需要调用一次 start 以启动
session.start(errno => {
if (errno) {
// 如果失败,将返回 errno
} else {
// 否则,返回null,表示成功
session.detectDepth({
frameBuffer, // 待检测图片的ArrayBuffer 数据。待检测的深度图像RGBA数据,
width, // 图像宽度
height, // 图像高度
})
}
})
- 通过摄像头实时估计
算法实时输出当前帧的深度图,每一帧像素的值代表当前的深度值,颜色越黑,代表距离摄像头越近,反之颜色越白,代表距离深度越远。
示例代码:
const session = wx.createVKSession({
track: {
depth: {
mode: 1 // mode: 1 - 使用摄像头;2 - 手动传入图像
},
},
})
// 需要调用一次 start 以启动
session.start(errno => {
if (errno) {
// 如果失败,将返回 errno
} else {
// 获取每一帧的信息
const frame = session.getVKFrame(canvas.width, canvas.height)
// 获取每帧的深度图信息
const depthBufferRes = frame.getDepthBuffer();
const depthBuffer = new Float32Array(depthBufferRes.DepthAddress)
//创建渲染逻辑, 将数组值传输到一张纹理上,并渲染到屏幕
render()
}
})
# AR模式接口
# 实时估计输出说明
# 1. 效果展示
# 2. 深度估计关键点
深度实时关键点输出字段包括
struct anchor
{
DepthAddress, // 深度图ArrayBuffer的地址, 用法如new Float32Array(depthBufferRes.DepthAddress);
width, // 返回深度图的宽
height, // 返回深度图的高
}
# 应用场景示例
- 特效场景。
- AR游戏以及应用(如下是AR虚实遮挡的例子)。
# 程序示例
视觉模式:
AR模式:
# demo体验
视觉模式:
- 实时深度估计能力,在小程序示例中的接口-VisionKit视觉能力-实时深度图检测中体验。
- 照片深度估计能力,在小程序示例中的接口-VisionKit视觉能力-照片深度图检测中体验。
AR模式:
- 在小程序示例中的接口-VisionKit视觉能力-水平面AR-v2-虚实遮挡中体验。