# 人脸关键点检测
VisionKit 从基础库 2.25.0 版本 (安卓微信>=8.0.25,iOS微信>=8.0.24) 开始提供人脸关键点检测,作为与 marker 能力和 OSD 能力 平行的能力接口。
从 微信 >= 8.1.0 版本开始提供人脸3D关键点检测,作为人脸2D关键点检测的扩展能力接口。
# 方法定义
人脸关键点检测有2种使用方法,一种是输入一张静态图片进行检测,另一种是通过摄像头实时检测。
# 1. 静态图片检测
通过 VKSession.detectFace 接口 输入一张图像,算法检测到图像中的人脸,然后通过 VKSession.on 接口 输出人脸位置坐标、106个关键点坐标以及人脸在三维坐标系中的旋转角度。

示例代码:
const session = wx.createVKSession({
track: {
face: { mode: 2 } // mode: 1 - 使用摄像头;2 - 手动传入图像
},
})
// 静态图片检测模式下,每调一次 detectFace 接口就会触发一次 updateAnchors 事件
session.on('updateAnchors', anchors => {
anchors.forEach(anchor => {
console.log('anchor.points', anchor.points)
console.log('anchor.origin', anchor.origin)
console.log('anchor.size', anchor.size)
console.log('anchor.angle', anchor.angle)
})
})
// 需要调用一次 start 以启动
session.start(errno => {
if (errno) {
// 如果失败,将返回 errno
} else {
// 否则,返回null,表示成功
session.detectFace({
frameBuffer, // 图片 ArrayBuffer 数据。人脸图像像素点数据,每四项表示一个像素点的 RGBA
width, // 图像宽度
height, // 图像高度
scoreThreshold: 0.5, // 评分阈值
sourceType: 1,
modelMode: 1,
})
}
})
# 2. 通过摄像头实时检测
算法实时检测相机中的人脸,通过 VKSession.on 接口 实时输出人脸位置坐标、106个关键点坐标以及人脸在三维坐标系中的旋转角度。
示例代码:
const session = wx.createVKSession({
track: {
face: { mode: 1 } // mode: 1 - 使用摄像头;2 - 手动传入图像
},
})
// 摄像头实时检测模式下,监测到人脸时,updateAnchors 事件会连续触发 (每帧触发一次)
session.on('updateAnchors', anchors => {
anchors.forEach(anchor => {
console.log('anchor.points', anchor.points)
console.log('anchor.origin', anchor.origin)
console.log('anchor.size', anchor.size)
console.log('anchor.angle', anchor.angle)
})
})
// 当人脸从相机中离开时,会触发 removeAnchors 事件
session.on('removeAnchors', () => {
console.log('removeAnchors')
})
// 需要调用一次 start 以启动
session.start(errno => {
if (errno) {
// 如果失败,将返回 errno
} else {
// 否则,返回null,表示成功
}
})
# 3. 开启3D关键点检测
想要开启人脸3D关键点检测能力,静态图片模式仅需要在2D调用基础上增加open3d字段,如下
// 静态图片模式调用
session.detectFace({
..., // 同2D调用参数
open3d: true, // 开启人脸3D关键点检测能力,默认为false
})
摄像头实时模式则在2D调用基础上增加3D开关更新函数,如下
// 摄像头实时模式调用
session.on('updateAnchors', anchors => {
this.session.update3DMode({open3d: true}) // 开启人脸3D关键点检测能力,默认为false
..., // 同2D调用参数
})
# 输出说明
# 1. 点位定义
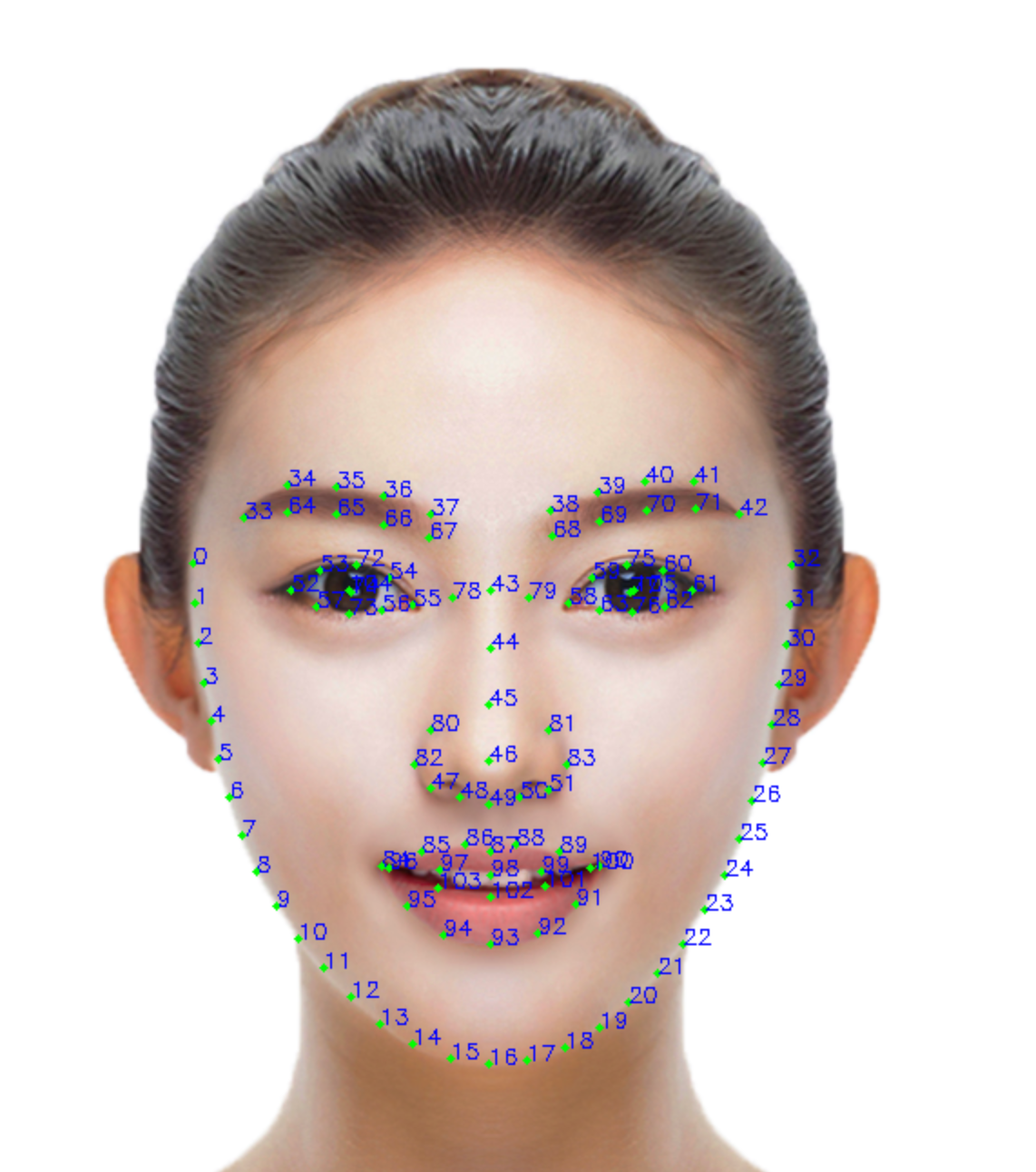
人脸2D关键点与人脸3D关键点均为106点,定义方式如下图所示。在脸部姿态发生变化时,人脸2D关键点的轮廓点会始终沿着可见人脸边缘,而人脸3D关键点则维持立体结构。
# 2. 人脸2D关键点
人脸2D关键点输出字段包括
struct anchor
{
points, // 106点在图像中的(x,y)坐标
origin, // 人脸框的左上角(x,y)坐标
size, // 人脸框的宽和高(w,h)
angle, // 人脸角度信息(pitch, yaw, roll)
confidence // 人脸关键点的置信度
}
# 3. 人脸3D关键点
开启人脸3D关键点检测能力后,可以获取人脸2D及3D关键点信息,其中人脸3D关键点输出字段包括
struct anchor
{
..., // 人脸关键点2D输出信息
points3d, // 人脸106点的(x,y,z)3D坐标
camExtArray, // 相机外参矩阵,定义为[R, T \\ 0^3 , 1], 使用相机内外参矩阵可将3D点位投影回图像
ccamIntArray // 相机内参矩阵,参考glm::perspective(fov, width / height, near, far);
}
# 应用场景示例
- 人脸检测。
- 人脸特效。
- 人脸姿态估计。
- 人脸 AR 游戏。
# 程序示例
# 特别说明
若小程序人脸识别功能涉及采集、存储用户生物特征(如人脸照片或视频、身份证和手持身份证、身份证照和免冠照等),此类型服务需使用微信原生人脸识别接口